EUC SYD / VIDEOPORTAL
Frontpage
00:38
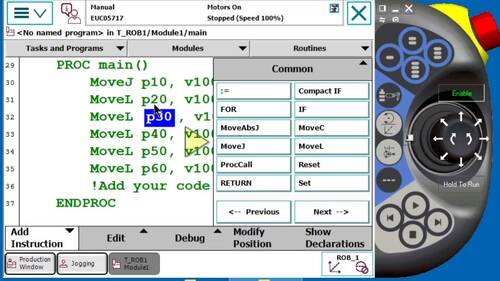
Ændre robot position i X, Y eller Z
Sådan ændre du en robot position f.eks. 0.2 mm. i X retningen
Del
Embed dette site
Del på Facebook
Channels
Arbejdsmiljø
Bet. vejl. Sdbr. HF Tømre
Biografreklamer
Data - Netværk
Smedeuddannelsen
Netværk I
PC schematic
Automatiktekniker GF2, Styring...
Automatiktekniker GF2, Pneumat...
Automatiktekniker, HAP4
Automatiktekniker, Servo
Automatiseringstekniker, HAP5
PLC kurser
PLC HMI
PLC Højniveau SCL
Industriel Ethernet på PLC st...
Servo med Technology Objects (...
Vision systemer
Robot
ABB Robot
DENSO Robot
FANUC Robot
KAWASAKI Robot
KUKA Robot
UNIVERSAL Robot
Robot Service og reparation
Beklædning
Data - programmering - LINQ
Elektriker GF2
Mad til mennesker
Mekaniker grundforløb, Lundsb...
Photoshop
Truckkørsel
Tømrer Undervisning - Sønder...
iPraxis Guides
Uddata_instruktioner
Robotteknologi programmering f...